Academic Projects
Assistive Technology Challenge
Spring 2024
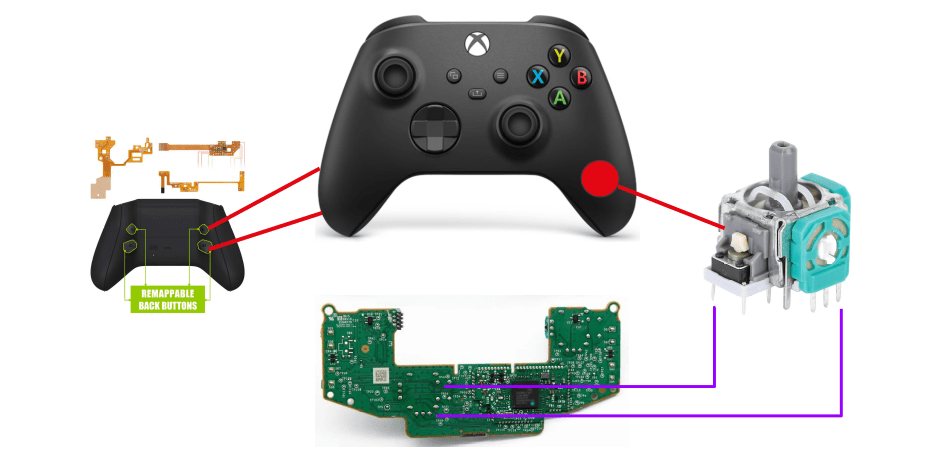
Mechanical and electronic modification of a video game controller for a person with hemiplegia.
User-centered design approach to improve ergonomics. Multiple iterations with user feedback.
Biorob – Roombots
Fall 2022
Developpement of a communication protocole for swarm robotics.
Low-level programmation, wireless communication, MQTT protocol implementation.
Aerial robotics
Spring 2023
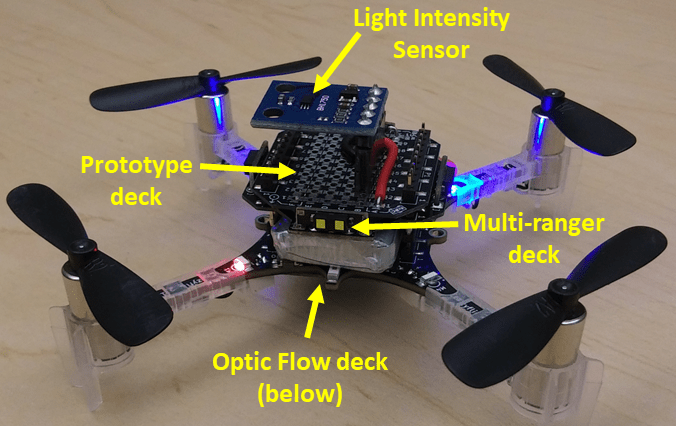
Programmation of an autonomous drone.
Low-level programmation, vision, mapping, path planning, Kalman filter, obstacle avoidance algorithm.
Thymio
Fall 2022
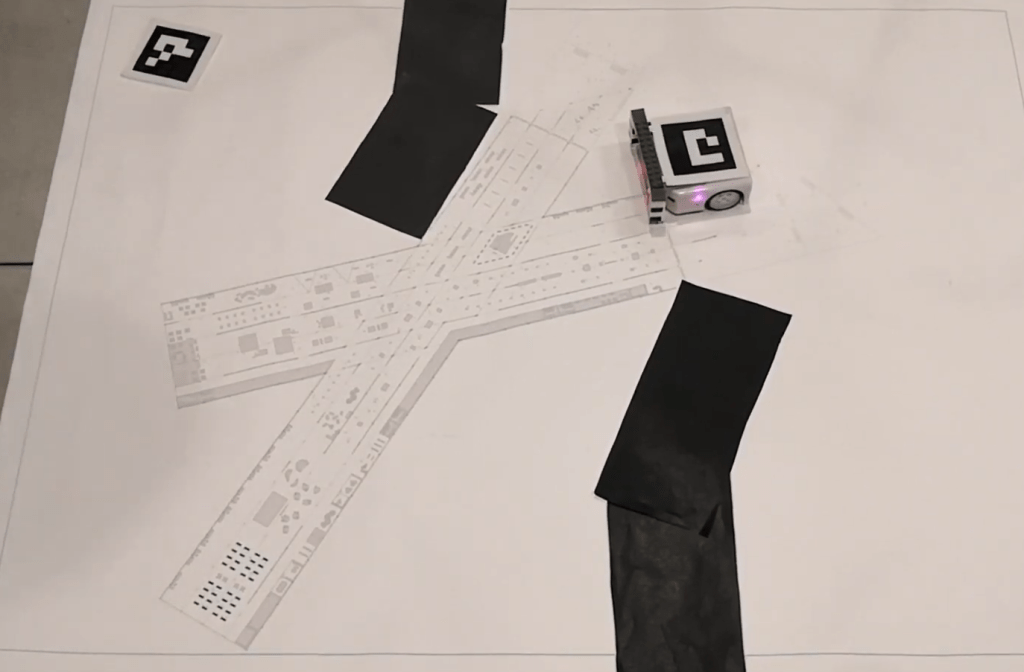
Programmation of a wheeled mobile robot.
Low-level programmation, vision, path planning, Kalman filter, obstacle avoidance algorithm.
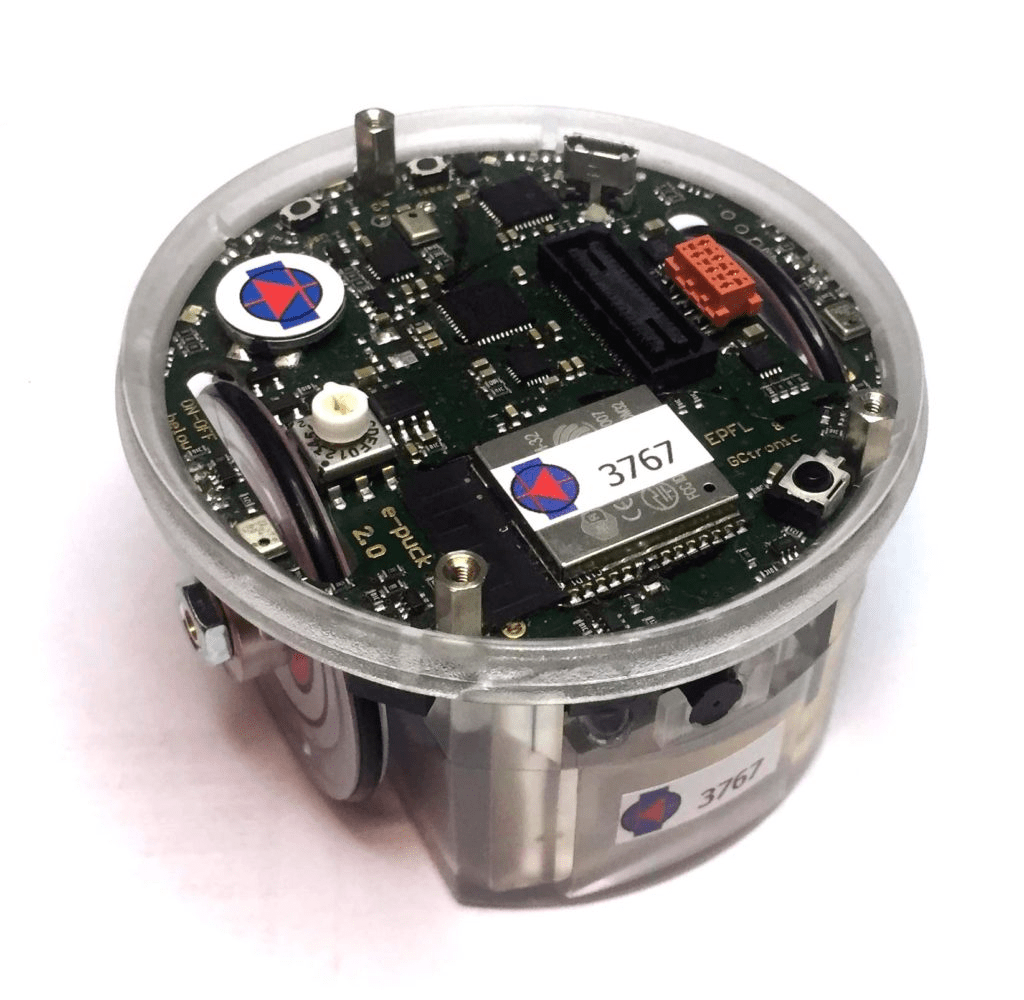
E-Puck
Spring 2022
Programming of a wheeled mobile robot on a microcontroller.
Low-level programming, navigation, obstacle avoidance algorithm.
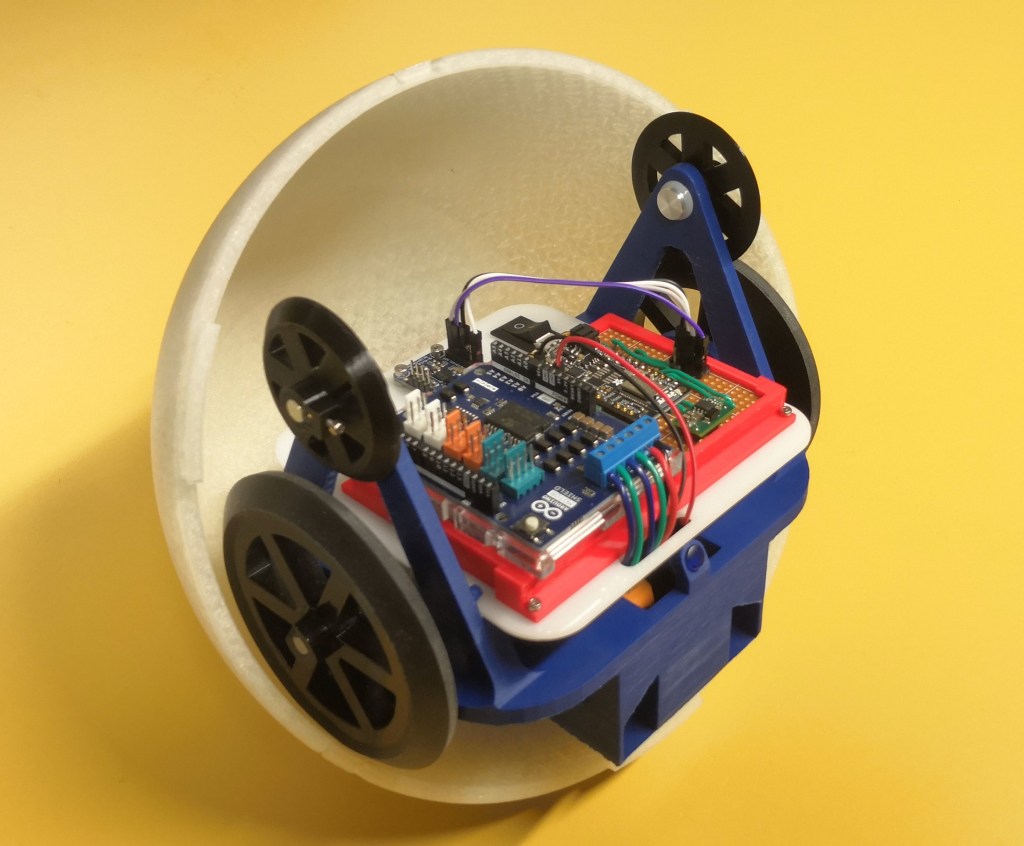
Sphero
Spring 2020 – summer 2021
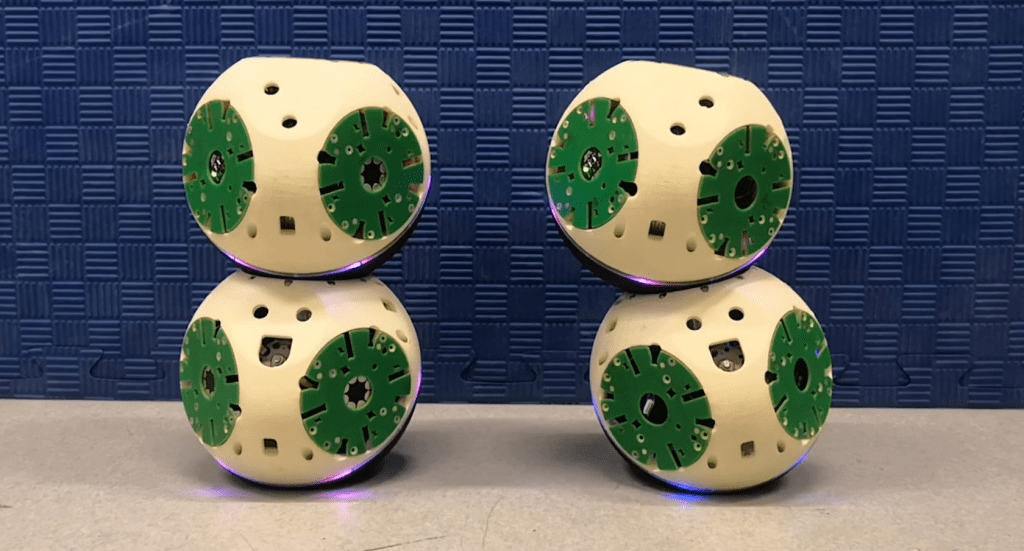
Design and development of a wireless spherical robot with internal actuation.
Mechanical and electronic system design, prototyping of multiple iterations.
Mathematical development and implementation of a control algorithm for dynamic stabilization.
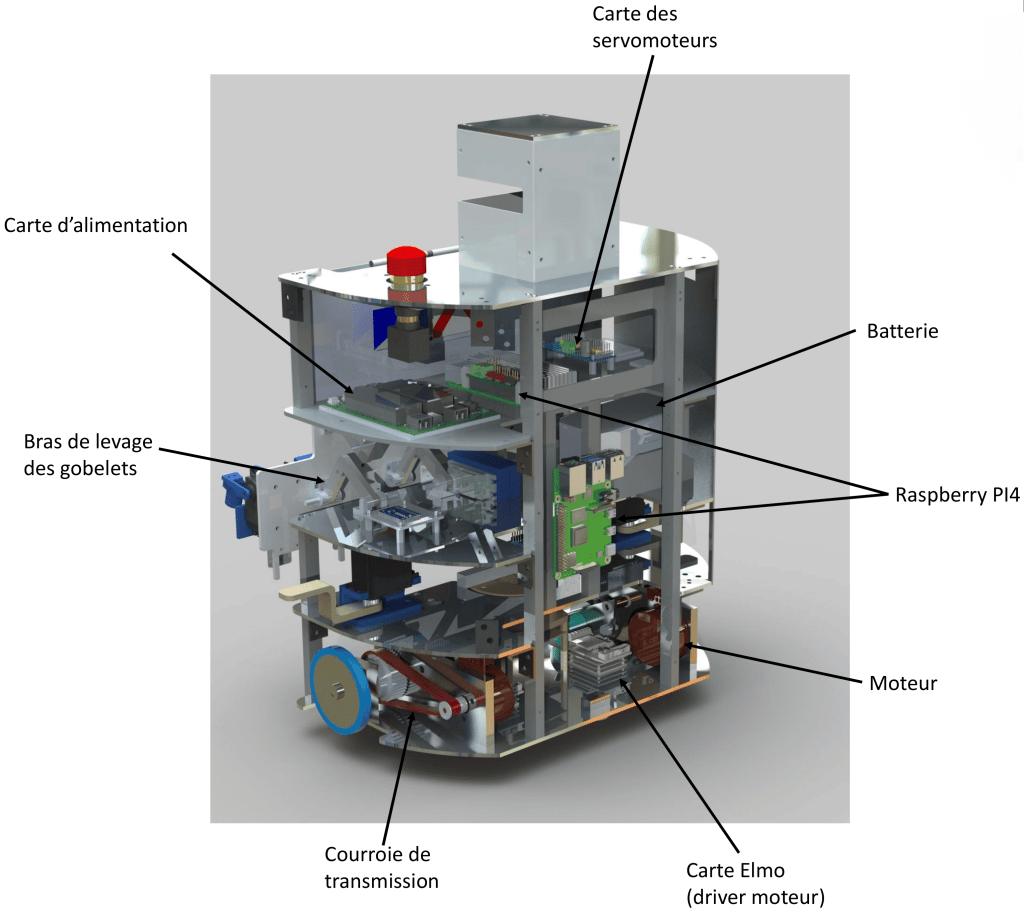
Eurobot 2021 Robotic’s club
Fall 2020 – Spring 2021
Realization of two autonomous robots for the Eurobot competition.
Project lead, Mechanical design, CAD, technical drawings, power electronic design, prototyping, quick problem solving under competition constraints.
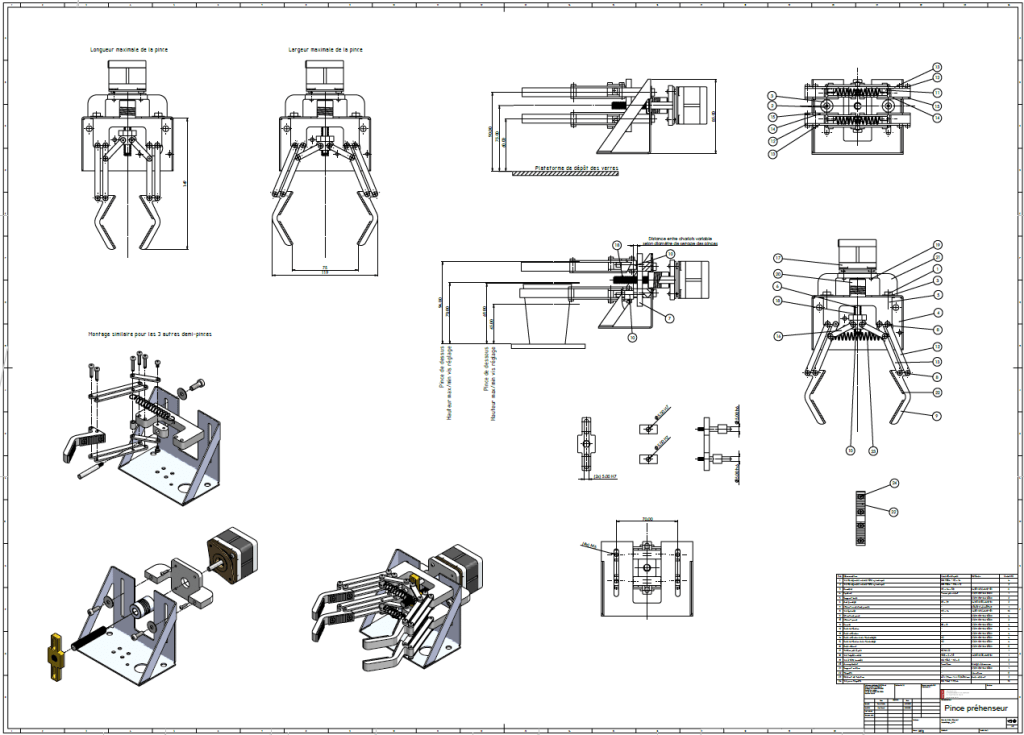
Glass Grasper
Fall 2019
Mechanical design of a gripper for automated glass dispenser.
Kinematic design, CAD, technical drawings.
Optimisation of mechanical design for multiple glass shapes.
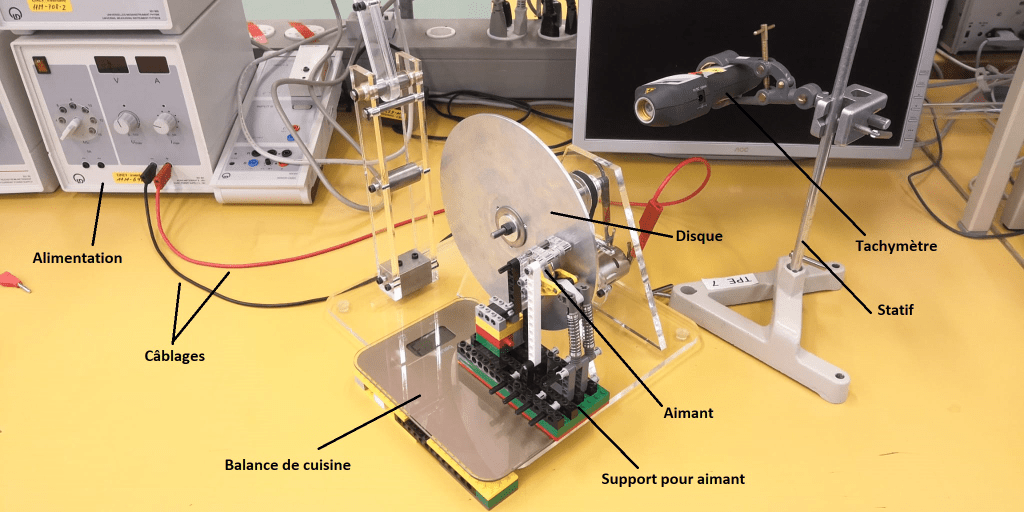
Eddy current testbench design
Fall 2019
Design of a testbench for physics experiments on Eddy currents.
Mechanical design, measurement system integration.
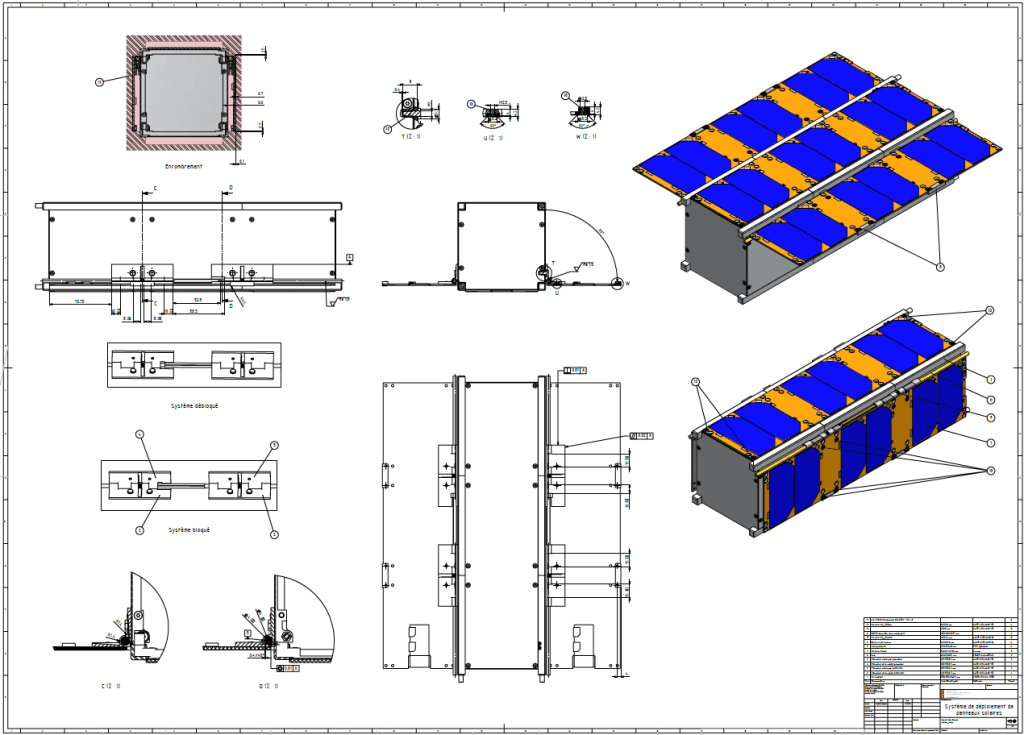
Cubesat solar pannel deployment mechanism
Spring 2019
Design of a mechanical deployment system for a satellite solar panel.
Kinematic analysis, CAD modelling, technical drawings.
Focus on reliability and space-constraint optimization.

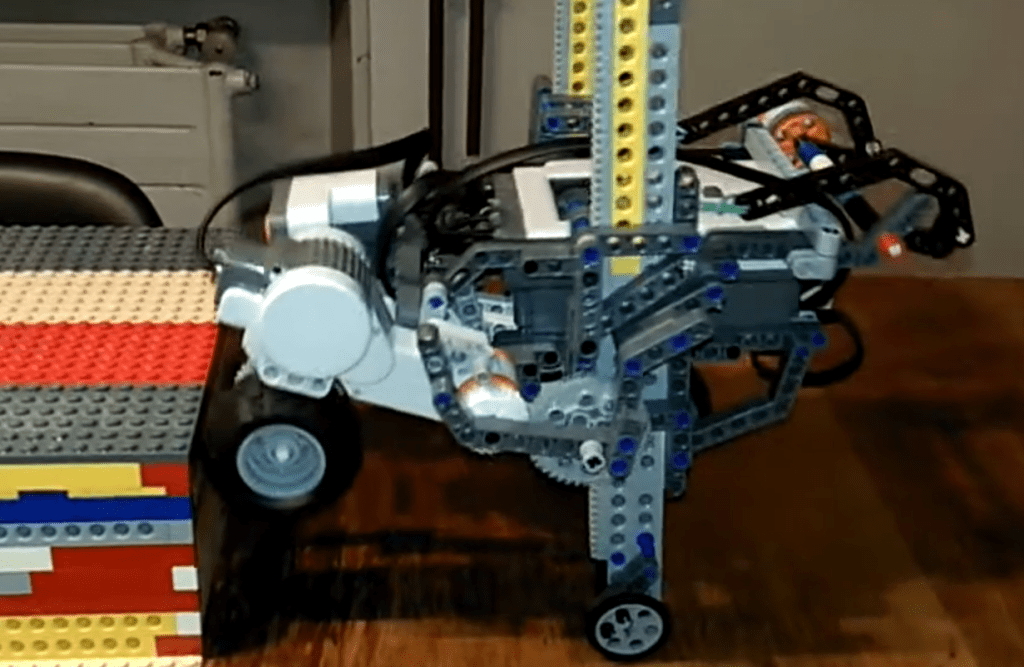
Lego Stairs-Climbing Robot
Spring 2015
Design and construction of a Lego robot capable of climbing stairs autonomously.
Mechanical design, iterative prototyping, experimental validation of locomotion strategy.
